
 English
English 中文
中文 Deutsch
Deutsch Español
Españolはんだ付けロボットの「再現性」【スティーブコラム】
2024年5月22日
スティーブコラム

スティーブコラム!
はんだ付けロボットの「再現性」
目次
資料ダウンロード
\国内外で1,000 社以上の導入実績/ジャパンユニックスの製品・サービスのご紹介資料

このコラムの動画はこちら
テーマ
ス みなさんこんにちは。ジャパンユニックス ソルダリングエンジニアのスティーブです。
今回は、はんだ付けロボットにとってとても重要な再現性についてお話しします。
まず、再現性とは何でしょう?再現性とは「同じ品質を安定してつくり続ける」こと。なんらかの要因で再現性が下がると、品質にバラつきが出てしまいます。
そんな再現性を維持するためのポイントは3つ。
では、一つひとつ見ていきましょう。
位置
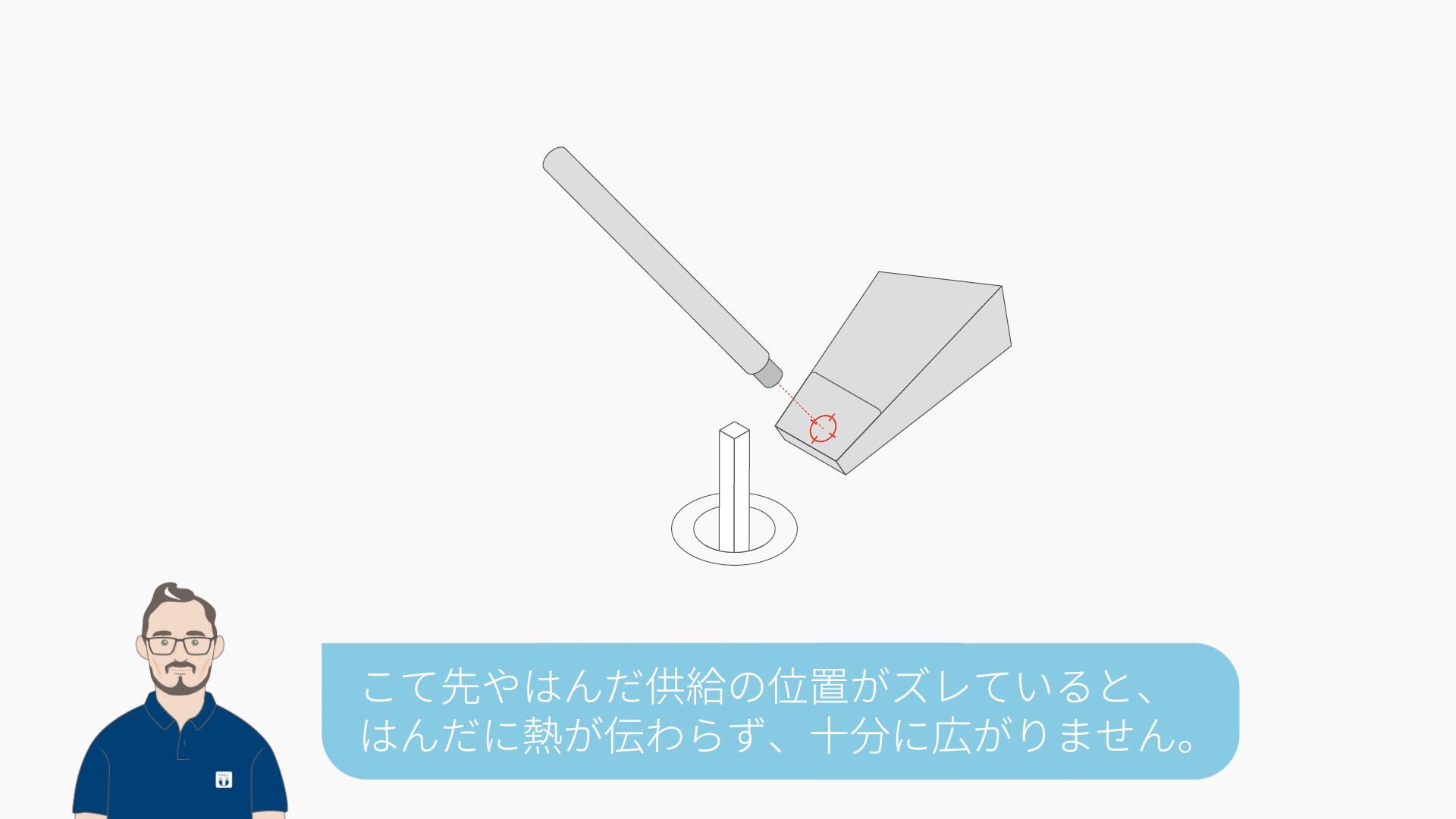
ス まずは、「位置」の再現性。
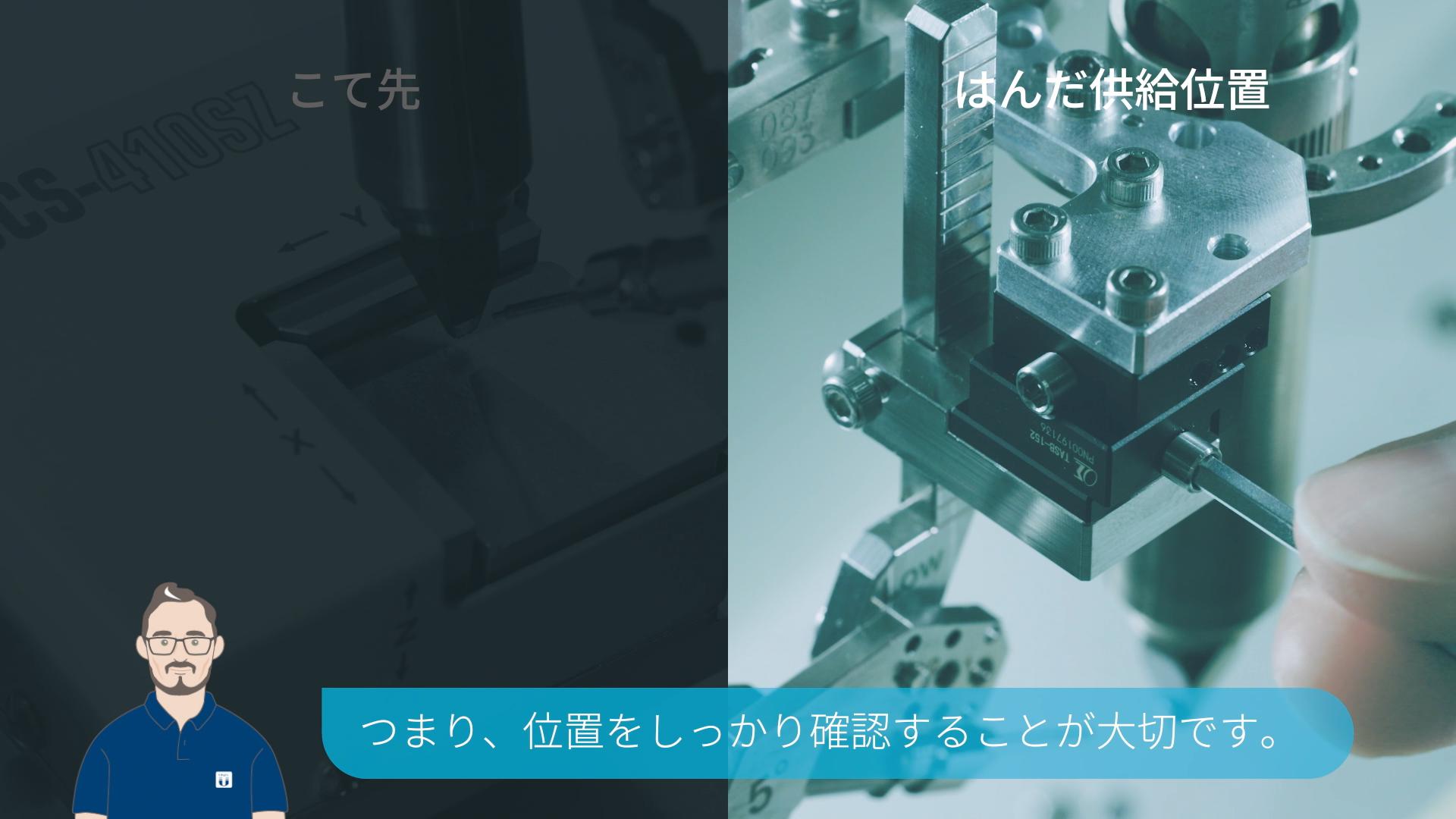
こて先やはんだ供給の位置がズレていると、はんだに熱が伝わらず、十分に広がりません。
そこで!
こて先がはんだと接触する位置に合わせること。また、前後左右からはんだ供給位置を調整すること。
つまり、位置をしっかり確認することが大切です。
状態
ス 次に、「状態」の再現性。
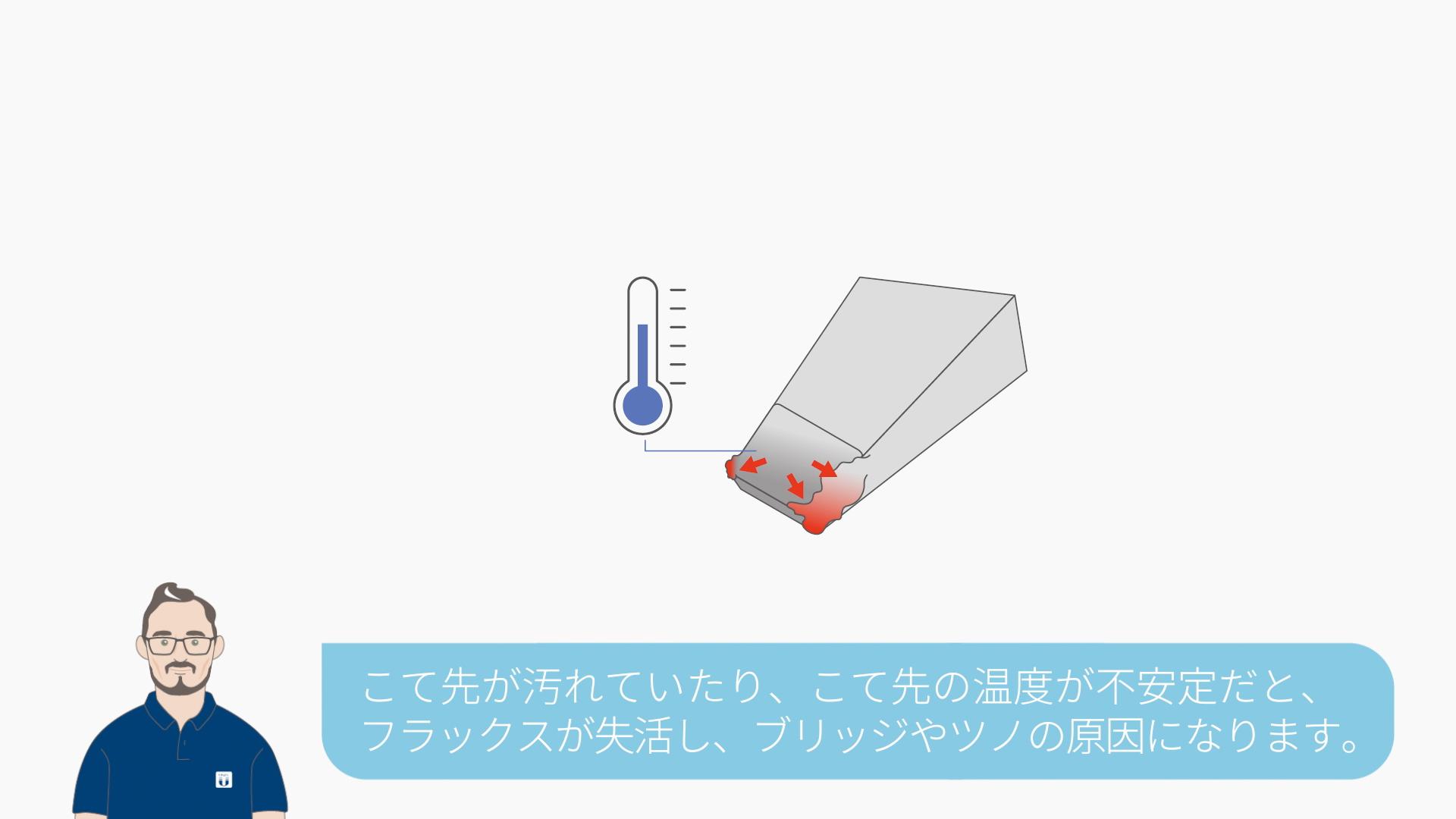
こて先が汚れていたり、こて先の温度が不安定だと、フラックスが失活し、ブリッジやツノの原因になります。
そこで!
エアクリーナーやブラシクリーナーでこて先を清掃し、テスターでこて先の温度を表示と合わせます。
つまり、この先の状態を一定に保つことが大切です。

動き
ス 最後は、「動き」の再現性。
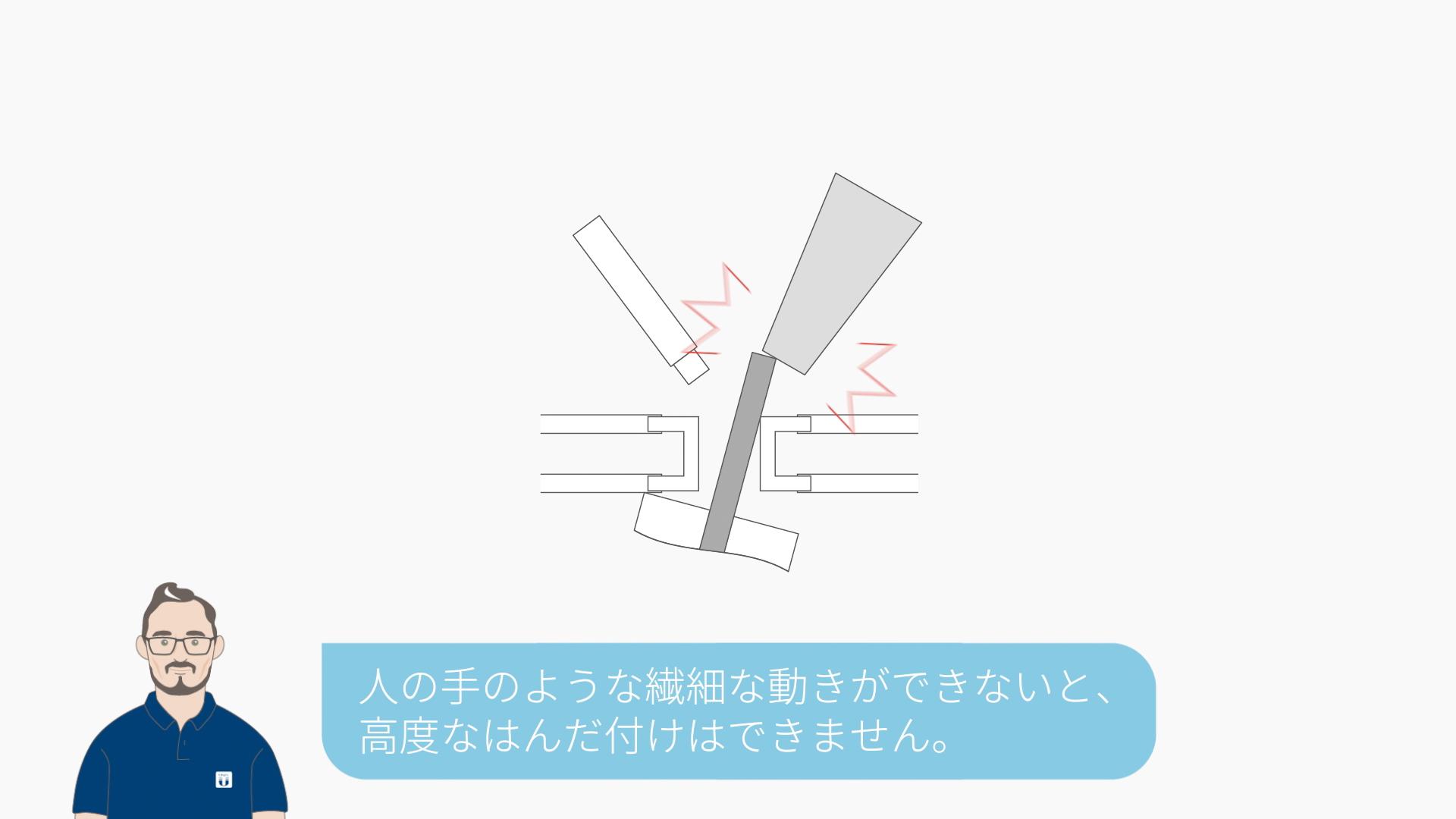
人の手のような繊細な動きができないと、高度なはんだ付けはできません。
そこで!
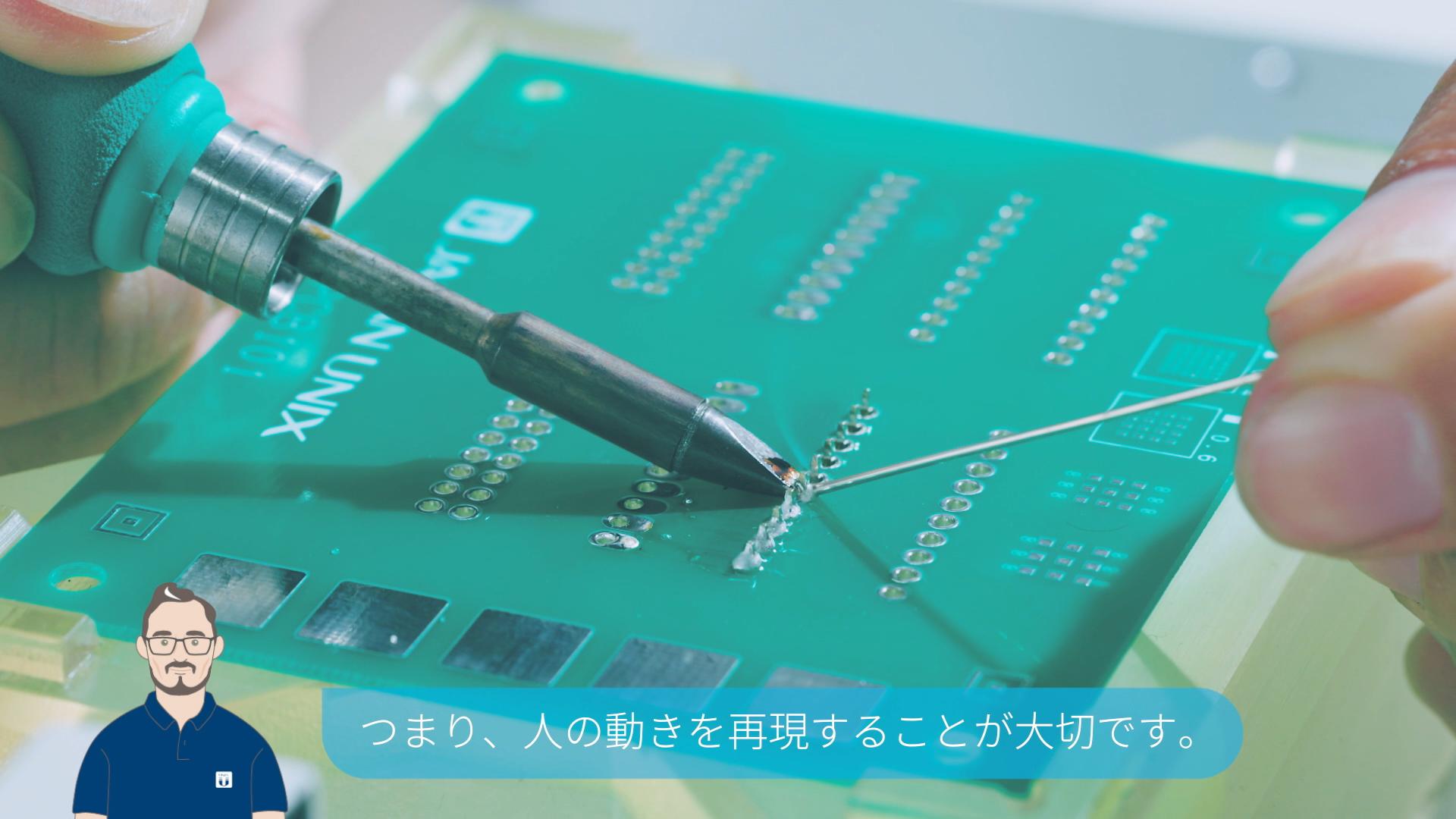
ロボットにあらかじめプログラムすることで職人技を覚えさせることができます。
つまり人の動きを再現することが大切です。
まとめ
ス 以上、位置、状態、動き。
この3つをしっかり管理して、はんだ付けロボットの高い再現性を維持していきましょう。
再現性についてわからないことは、いつでもジャパンユニックスまでご相談ください。
では、またお会いしましょう!

資料ダウンロード
\国内外で1,000 社以上の導入実績/ジャパンユニックスの製品・サービスのご紹介資料
関連製品・サービス
今回のコラムの動画はこちら