English
English 中文
中文 Deutsch
Deutsch Español
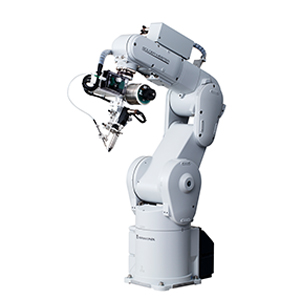
Español垂直多関節型はんだ付けロボット
フルオートメーションラインの時代に向けた
新世代の垂直多関節型はんだ付けロボット

特徴
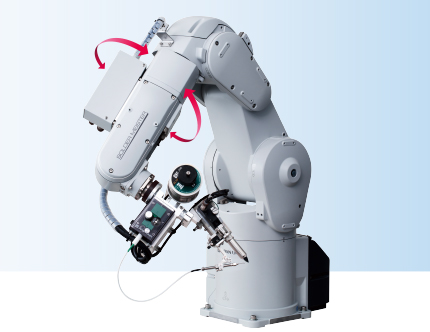
垂直多関節ロボットの特徴を活かした3D実装
垂直多関節ロボットならではの動きを活かし、水平面のはんだ付けだけでなく、角度のある実装面でも最適な角度からはんだ付けを実現。よりフレキシブルな生産が可能に。
設置スペースにもメリット
3D実装が可能になるといった実装面のメリットだけでなく、設置スペース縮小に対しても効果あり。ロボットそのもののサイズ、動作において、水平多関節より必要スペースを縮小。オプション品であるこて先3軸位置補正機構もセンサー部を垂直方向に設置でき、設置スペースをより3Dな空間として利用できる。

はんだ条件ソフト
Soldering Configurator M3
はんだ付けに関するデータを保存、編集できるソフトウェア。見てわかるインターフェースとなっており、ステップごとにPC上で編集ができ、オペレータスキルに関係なく、はんだ条件編集が可能。
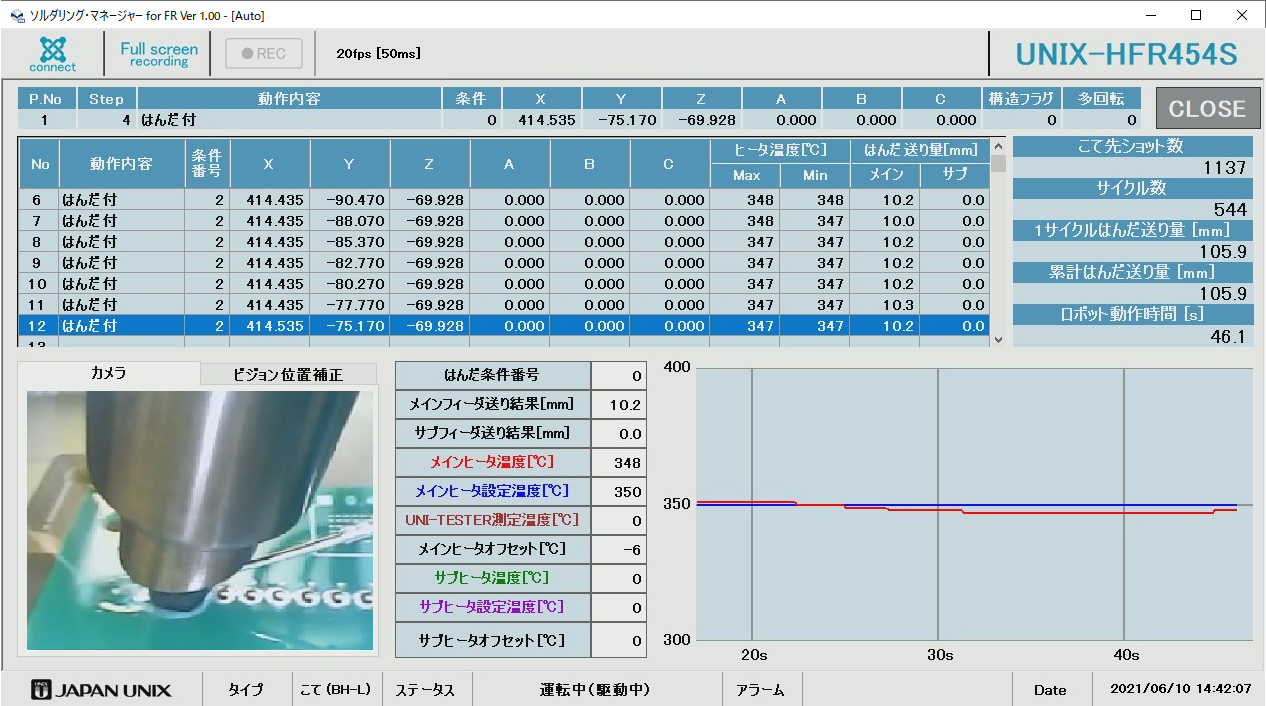
モニタリングソフト
Soldering Manager for FR
はんだ付けロボット稼働状態をリアルタイムでモニタリング、トレースを実施。省人化を図るインライン生産でも生産状況を常に把握することができる。はんだ付けヘッドにカメラ搭載することで録画することもでき、2次元コード情報の読み取りによるシリアル管理と合わせ、より充実したトレーサビリティが可能に。

Ethernetによる外部通信機能
Ethernetによる通信で稼働状況のモニタリング、トレースだけでなく、外部からはんだ条件の設定変更が可能。これによりライン専用のインターフェースで条件編集が可能となり、よりインテグレートされたオートメーションラインを組むことができる。
産業用Ethernet(Ethernet/IP)にも対応。
標準構成
こて

ロボット本体

ロボットコントローラ

はんだ付けコントローラ

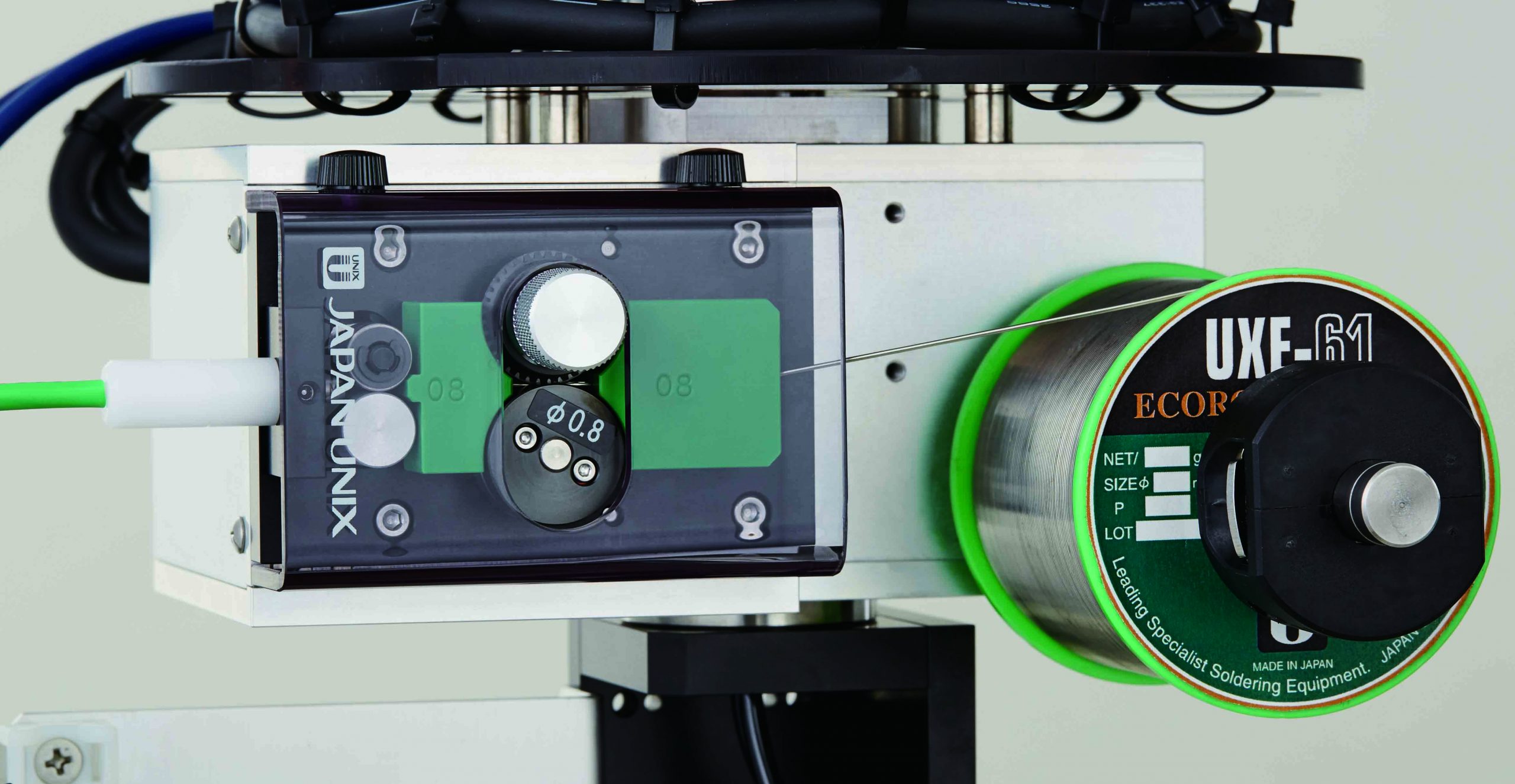
標準フィーダ
※どちらか選択。
クリーンカットフィーダ
※どちらか選択。

はんだ付ヘッド/ヒータ

こて用ロックオン機構

クリーナボックス
UJC-214
※どちらか選択。

クリーナボックス
UJC-219
※どちらか選択。
はんだ条件ソフトウェア
Soldering Configurator M3

ティーチングボックス
オプション
こて

画像位置補正
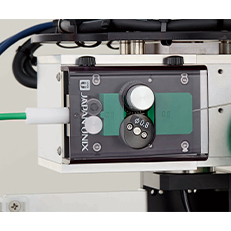
-ビジョンセンサ-

はんだ残量センサ

はんだこてテスタ
UNI-TESTER

シリコンブラシクリーナ

三軸位置補正機構
Soldering Manager for FR
消耗品(こて先)

2,500種類を超えるラインアップから最適なこて先を選択できます。
はんだ付の品質は、「正しいこて先」の選択が重要です。
部品の大小だけではなく、基板素材等、様々な条件から選ばなければなりません。
ジャパンユニックスでは、自動はんだ付専用に開発した、高性能こて先を多数取り揃えています。
また、お客様のワークに合わせて特殊形状の特注品設計・製造もおこなっています。

※コピー品にご注意ください
類似したコピー品のこて先がインターネット及び非正規代理店等で販売されていることが確認されております。ご注意ください。
詳しくはこちら
参考動画